Realtime Arm Servoing¶
This tutorial shows how to send real-time servo commands to a ROS-enabled robot. Some nice features of the servo node are singularity handling and collision checking that prevents the operator from breaking the robot.
Getting Started¶
This tutorial demonstrates the servo node with a UR5 Gazebo simulation. If you haven’t already done so, make sure you’ve completed the steps in Getting Started.
Clone universal_robot melodic-devel branch into the same catkin workspace from Getting Started:
cd ~/ws_moveit/src
git clone -b melodic-devel https://github.com/ros-industrial/universal_robot
Install any new dependencies that may be missing:
rosdep install -y --from-paths . --ignore-src --rosdistro $ROS_DISTRO
Re-build and re-source the workspace.
cd ~/ws_moveit/
catkin build
source devel/setup.bash
Launch the Gazebo simulation:
roslaunch ur_gazebo ur5.launch
roslaunch ur5_moveit_config ur5_moveit_planning_execution.launch sim:=true
roslaunch ur5_moveit_config moveit_rviz.launch config:=true
In RViz, grab the red/blue/green “interactive marker” and drag the robot to a non-singular position (not all zero joint angles) that is not close to a joint limit. Click “plan and execute” to move the robot to that pose.
Switch to a compatible type of ros-control controller. It should be a JointGroupVelocityController or a JointGroupPositionController, not a trajectory controller like MoveIt usually requires.
rosservice call /controller_manager/switch_controller "start_controllers: ['joint_group_position_controller']
stop_controllers: ['arm_controller']
strictness: 0
start_asap: false
timeout: 0.0"
Launch the servo node. This example uses commands from a SpaceNavigator joystick-like device:
roslaunch moveit_servo spacenav_cpp.launch
If you do not have a SpaceNav 3D mouse, you can publish example servo commands from the command line with:
rostopic pub -r 100 -s /servo_server/delta_twist_cmds geometry_msgs/TwistStamped "header: auto
twist:
linear:
x: 0.0
y: 0.01
z: -0.01
angular:
x: 0.0
y: 0.0
z: 0.0"
The -r 100 sends new commands at a 100 Hz rate. The combination of -s and auto updates the timestamp automatically.
Settings¶
User-configurable settings of the servo node are well-documented in servo/config/ur_simulated_config.yaml.
Changing Control Dimensions¶
The dimensions being controlled may be changed with the change_control_dimensions (moveit_msgs/ChangeControlDimensions) service. The service consists of the 6 booleans representing the manipulator’s degrees of freedom (3 translation and 3 rotation), defined in the input velocity command frame. Setting one of these booleans to false will result in the user input in that direction being overwritten with a 0, thus disallowing motion in the direction.
Robot Requirements¶
The servo node streams an array of position or velocity commands to the robot controller. This is compatible with ros_control position_controllers/JointGroupPositionControllers or velocity_controllers/JointGroupVelocityControllers. You can check if these controllers are available for your robot by searching for the controller config file (typically named controllers.yaml). After launching the robot, you can check if any ros_control controllers are available with:
rosservice call /controller_manager/list_controllers
And switch to the desired controller with:
rosservice call /controller_manager/switch_controllers controller_to_start controller_to_stop
NOTE: You can tab-complete to help fill these commands.
Servoing may work on other robots that have a different control scheme but there is no guarantee. It has been tested heavily on UR robots using the ur_modern_driver. The servo node currently does not limit joint jerk so may not be compatible with most heavy industrial robots.
The servo node can publish trajectory_msgs/JointTrajectory or std_msgs/Float64MultiArray message types. This is configured in a yaml file (see config/ur_simulated_config.yaml for an example). Most robots that use ros_control will use the Float64MultiArray type. Some UR robots using older driver versions can require the JointTrajectory message type.
ROS Signals¶
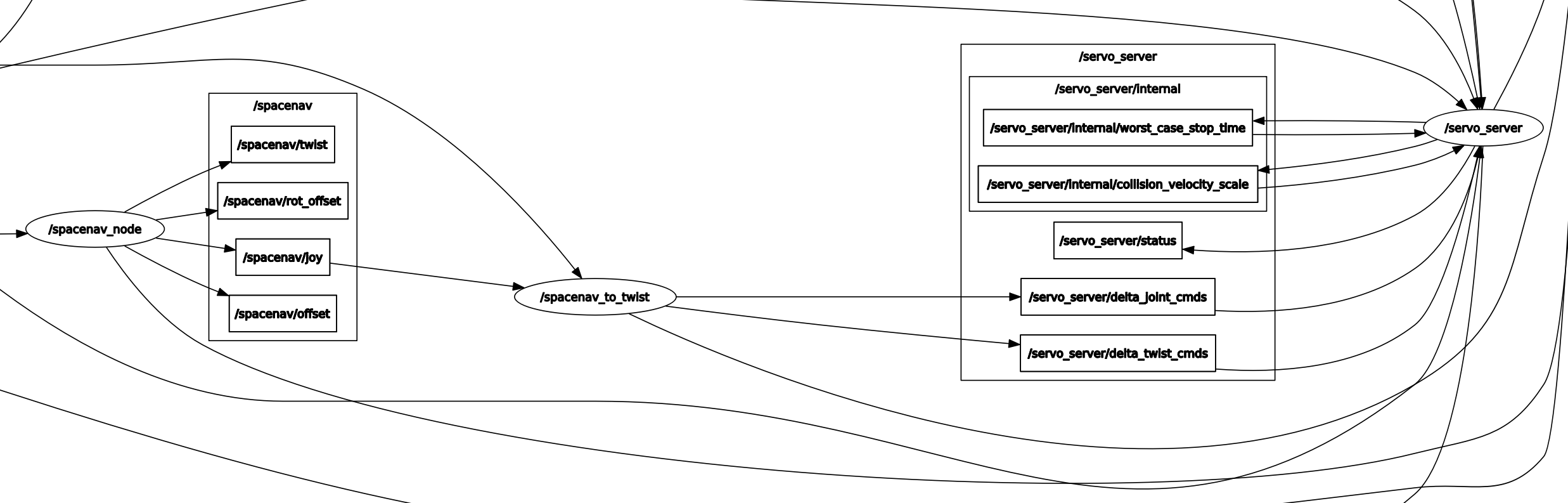
An rqt_graph of the servo node is shown below (Enlarge by clicking it). Most of these connections can be ignored. The important ones are:
servo_server node: Does the core calculations.
spacenav_to_twist node: Converts incoming commands from the joystick to Cartesian commands or joint angle commands, depending on which buttons are pressed.
joint_group_position_controller/command topic: This is the outgoing command that causes the robot to move.
change_control_dimensions service: This is the service to change which dimensions servoing is allowed in
Configuring Control Devices (Gamepads, Joysticks, etc)¶
The moveit_servo/config folder contains two examples of converting SpaceNavigator 3D mouse commands to servo commands. spacenav_teleop_tools.launch loads a config file then publishes commands to the servo node on the spacenav/joy topic. It is easy to create your own config file for a particular joystick or gamepad.
spacenav_cpp.launch launches a C++ node that does the same thing but with less latency. We do not plan to accept C++ pull requests for more controller types because there is a lot of overhead involved in supporting them.
Integration Testing¶
There is a Python integration test in test/integration. Run it by:
roscd moveit_servo
catkin run_tests --this
开源反馈
有地方需要改进?请在 GitHub page 新开一个 pull request。